Схемы подключения
Провода трехфазного двигателя подключаются либо по схеме треугольника, либо по звезде. При этом для последнего напряжение должно быть выше. Также перед установкой обмотки нужно определить момент на валу в моторе
Стоит обратить внимание на тот момент, что АДКР, подсоединенный различными методами к одной и той же цепи, требует разной мощности. Поэтому нельзя подключать двигатель, в котором предполагается использование только схемы треугольника, с принципом треугольника
Иногда с целью снижения пускового тока люди коммутируют на этапе пуска контакты звезды в треугольник, но в таком случае падает и пусковой момент.
А для подсоединения трехфазного мотора к однофазной электросети профессионалы применяют разные фазосдвигающие детали, например конденсатор и резистор.
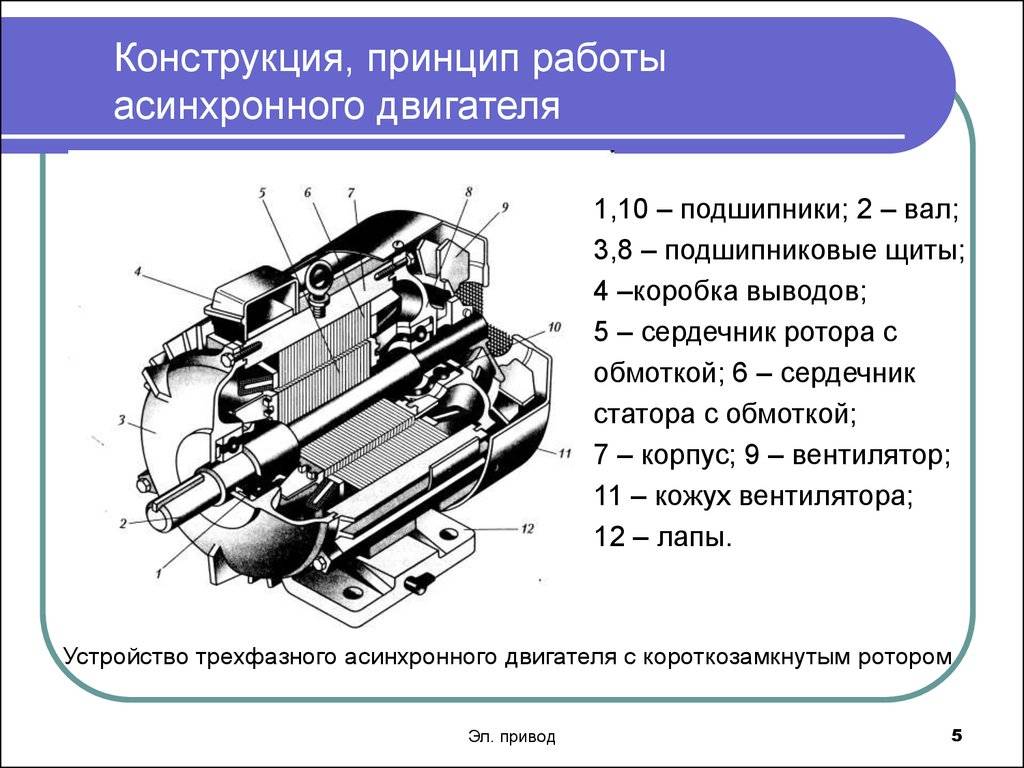
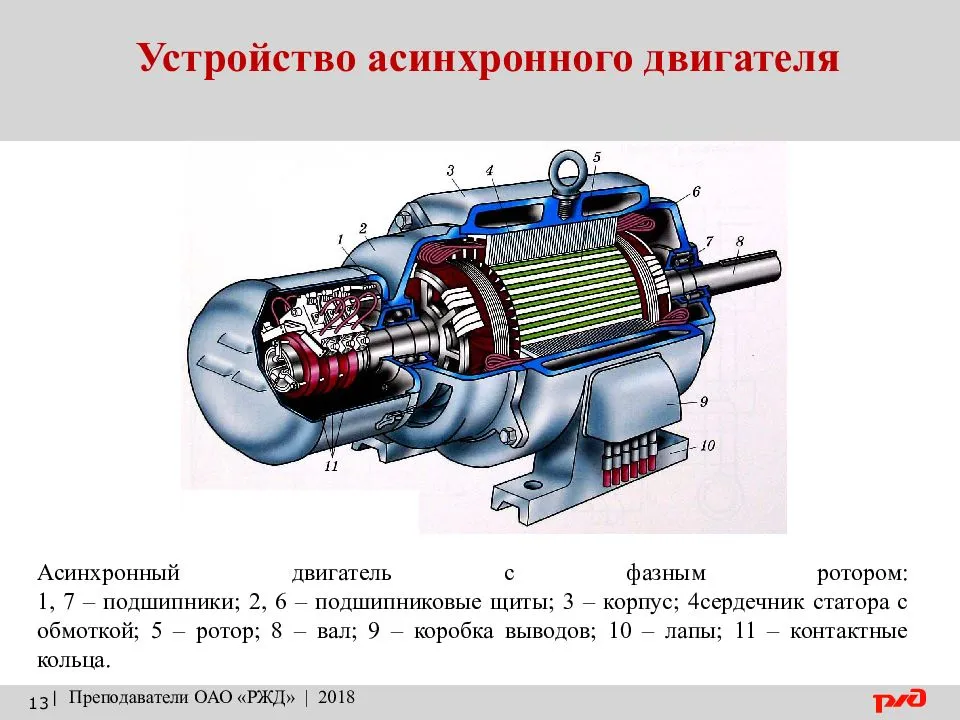
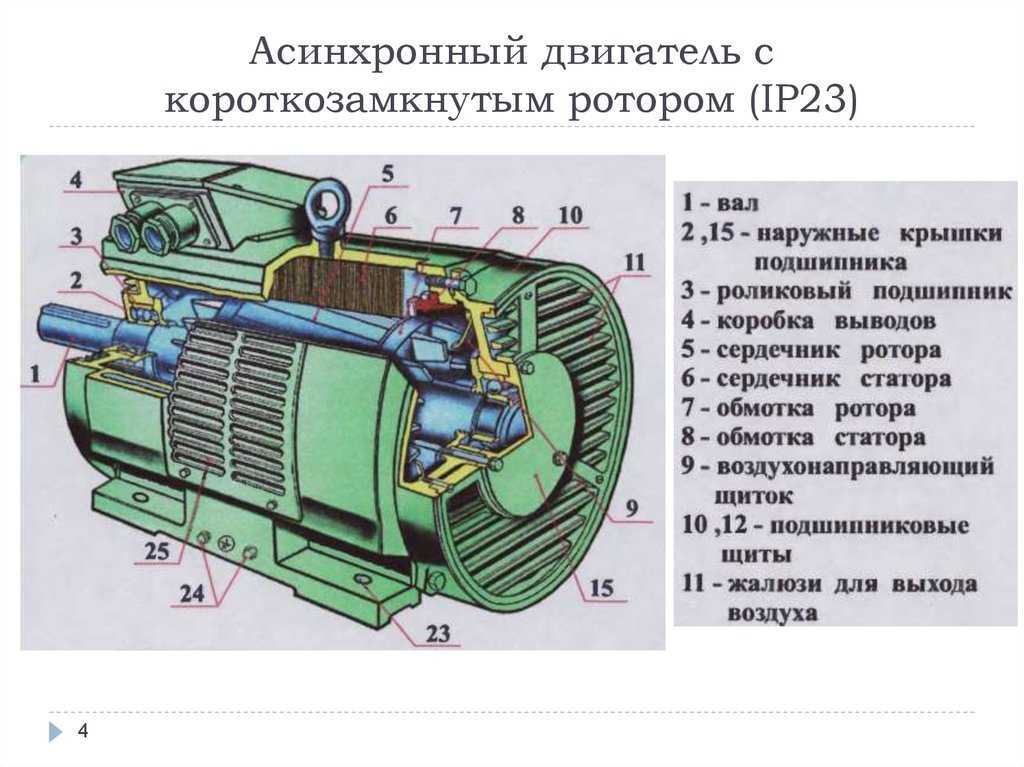
Устройство асинхронного двигателя
Устройство асинхронного двигателя является достаточно простым:
- Статор – является неподвижной частью электрического двигателя, который снабжен обмотками возбуждения.
- Ротор – вращающийся элемент мотора, который крутится под действием магнитного поля, создаваемым обмотками возбуждения, расположенными на статоре. Различают 2 типа двигателя от конструкции ротора: короткозамкнутые и фазные.
- Фланцы – статическая часть электрического двигателя, в которой находятся опорные подшипники, удерживающие ротор и являющиеся своего рода крепежом для статора. Он зажимается между двумя фланцами-крышками стяжными болтами. Либо они прикручены к корпусу статора.
- Клеммная коробка – часть статической конструкции двигателя, в которую выводятся концы обмоток со статора. Посредством его осуществляется подключение двигателя к схеме управления.
- Крыльчатка и защитный кожух – используется для обеспечения принудительной вентиляции, а кожух предохранит обслуживающий персонал от травматизма.
- Дополнительные сервисные обмотки – при необходимости совместно с обмоткой возбуждения на статоре может быть дополнительная, предназначенная для контроля и измерения рабочих параметров мотора во время его работы.
- Термодатчики – промышленные асинхронные двигателя, кроме обмоток, также имеются датчики температуры, контролирующие перегрев на случай резкого возрастания тока потребления.
Также двигателя могут быть оборудованными планарными редукторами и изготовленными в едином корпусе. Это преимущественно промышленные типы агрегатов, применяемые на станках, конвейерах и прочих видах оборудования.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин-1
Начальный пусковой момент – момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение – значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (), Вт
При этом
потери в электродвигатели обусловлены: электрическими потерями – в виде тепла в результате нагрева проводников с током; магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие; механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии); дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m – масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .



Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Расчёт числа повторений
Возьмём m1 – процесс повторения постоянного поля магнитов и ротора. Система фазы переменного тока образуют вращение поля магнитов.
Данные расчета считаются по формуле:
m1=60f1/p
f1– частота электричества$
p – количество полюсных пар каждой обмотки статора.
m2 – процесс повторения вращения ротора. Имея различное количество одновременных повторений, данная скорость частоты будет асинхронной. Определение расчёта частоты проводится по соотношению между данными:
(m2≠m1)
Асинхронный электродвигатель работает только при асинхронной частоте.
(m2<,m1)
При одновременном вращении статора и ротора, расчет скольжения будет равняться нулю.
Двухроторный АД используется для привода разных механизмов. Различие двухроторного двигателя заключается присутствием в конструкции двух роторов. Второй ротор выполняет функцию вспомогательную, может вращаться с другой скоростью. Вспомогательный ротор представляет собой внутренний хомут для замыкания постоянного потока магнитов, охлаждения электродвигателя. Недостаток двухмоторного асинхронного двигателя в низком КПД от использования ферромагнитного вспомогательного ротора.
https://youtube.com/watch?v=oxS9KdALqhA
В ходе исследования двухроторных машин достигаются близкие данные скоростик желаемым, когда вспомогательный ротор имеет максимальные вентиляционные зазоры. Полый ротор установлен на ступице, его вал расположен внутри цилиндра. При вращении вспомогательного ротора вентиляция работает по принципу центробежного вентилятора. Для увеличения пускового момента и большей электрической нагрузки полый ротор должен регулироваться, перемещаясь вдоль вала, с установленным штифтом, конец чего входит в паз ступицы ротора.
Данные для расчета:
Пусковой ток
Прямой пуск мотора характеризуется значительно большим уровнем тока, чем при его стабильной работе. Пусковой показатель может превышать номинал в 5-8 раз. При этом номинальный ток всегда указывается производителем на шильдике двигателя, тогда как пусковой описан только в технической документации. В характеристиках этот параметр указан как отношение пускового тока к номинальному.
Как вычислить пусковое напряжение?
Есть несколько способов произвести расчет пускового тока для асинхронного двигателя. Эти варианты пригодятся в том случае, если величина соотношения не указана в технической документации или сопровождающие бумаги были утеряны:
- Осциллограф. Проверка показаний производится в момент пуска посредством резисторного шунта. Действующее напряжение вычисляют из максимального амплитудного значения, после чего, используя закон Ома, определяют пусковой ток. Преимущество такого способа в получении конкретных данных по определенному двигателю.
- Пониженное напряжение. В таком варианте на двигатель подается сниженное в 5-10 раз напряжение и производится замер. После пересчета получается пусковой ток. Причем замеры достаточно произвести для 1 фазы. На остальных пусковые показатели должны быть аналогичными. Данный способ применяется на производстве для получения данных, отображаемых в таблице. Основанием служит номинальный ток, поэтому в каждом отдельном случае пусковой показатель может быть другим.
- Токоизмерительные клещи. Простой и быстрый метод. Наиболее точные показания получаются при замере на системах с длительным пуском и высокой инерцией. Например, это могут быть вентиляторы или двигатели с массивной крыльчаткой.
- Трансформатор. Способ, применяемый в узлах учета электроэнергии. Используя трансформатор, не нужно измерять реальный ток, достаточно получить его величину, уменьшенную в определенное количество раз. Существенным минусом метода является то, что трансформатор рассчитан на частотный диапазон в 50-60 Гц, тогда как пусковые переходные процессы могут иметь более широкий спектр и гармоники.
Важно помнить, что, в силу определенных факторов, заявленный производителем пусковой ток будет иметь большую кратность, чем его реальное значение
Как уменьшить напряжение при пуске асинхронного мотора
Большое пусковое усилие часто становится проблемой, вызывая перегрузки питающей сети, перегрев, ускоренный износ двигателя. Поэтому необходимо иметь возможность понизить его величину для сохранения работоспособности и долговечности систем. Есть несколько способов:
- Плавный пуск. В таком варианте на двигатель подается сначала пониженное напряжение с постепенным повышением до номинала. Для реализации метода используются УПП (устройства плавного пуска) или частотные преобразователи.
- Ограничители. В таком исполнении в качестве ограничивающего элемента при пуске применяются резисторы с высокими показателями сопротивления. После срабатывания таймера производится переключение двигателя на номинальное значение. Для сборки такого пускового устройства достаточно использовать контактор и реле времени, поэтому сделать его можно самостоятельно.
- Звезда-треугольник. Особый способ подключения обмоток, который позволяет сразу использовать полное напряжение на прямой пуск и реверс, однако выводить магнитное поле двигателя на номинальную мощность постепенно. Такой подход помогает сохранить рабочие характеристики агрегата. Чертеж подобного подключения можно найти в интернете.
Есть также варианты запуска и раскручивания асинхронного реверсивного двигателя вхолостую. Нагрузка подключается только после достижения достаточных оборотов. В таком исполнении могут применяться вариаторы, муфты, коробки передач. При необходимости реализовать быструю остановку, можно использовать динамическое торможение, для чего на обмотки статора подается постоянное напряжение.
Преимущества покупки в компании «Промышленная точка»
«Промышленная точка» — один из крупнейших поставщиков оборудования на юге РФ. Ознакомьтесь с нашим ассортиментом. Мы отдаем предпочтение ведущим брендам в своих отраслях. Купить нужный асинхронный электродвигатель можно несколькими способами:
- Добавить нужный товар в корзину и нажать на кнопку «Отправить заявку».
- Оставить заявку на покупку, нажав на кнопку «Быстрый заказ». Менеджер позвонит вам и сам оформит покупку.
Оплатите трехфазный асинхронный электродвигатель картой или наличными и заберите на складе в Ростове-на-Дону или Зернограде. Второй вариант — закажите бесплатную доставку в Ростов-на-Дону, Зерноград, Батайск или Аксай. Также мы доставляем товар по всей России. Оплатить его можно банковской картой на сайте.
Обратитесь к менеджеру, и он поможет выбрать нужную модель, уточнит наличие, условия и сроки доставки.
Для наших покупателей мы предоставляем следующие преимущества:
- большой ассортимент трехфазных двигателей;
- оперативную доставку товара по всей России;
- выгодные цены;
- скидки при оптовом заказе.
Выбирайте удобный способ оплаты, забирайте трехфазный асинхронный электромотор самовывозом или оформляйте доставку. С «Промышленной точкой» вы получите лучшее импортное и отечественное оборудование.
Виды двигателей постоянного тока
К концу 19 века уже началась эксплуатация электрических машин постоянного тока: генераторов и моторов. Причем оба вида не отличаются конструктивно и могли применяться как для выработки электроэнергии, так и для производства работ.
Коллекторный мотор
Принцип вращения рамки с током в поле постоянного магнита наиболее ярко реализован в коллекторных электродвигателях. Такие электродвигатели работают как от постоянного, так и от переменного тока. Впервые судно с двигателем постоянного тока запустил Б.С. Якоби по реке Неве в 1838г.
Такой двигатель состоит из неподвижной части (статор), на которой устанавливаются магниты для маломощных двигателей или катушки из ферримагнитных сталей, и обмотки с медным проводом для мощных электрических машин.
Якорь МПТ собран из пластин электротехнической стали, изолированных от вала и друг от друга для уменьшения вихревых токов. В пазы цилиндра укладывается витки провода из меди разного сечения в зависимости от токов и выбранной схемы (петлевая, волновая). Концы проводов выводятся и ввариваются (впаиваются) в ламели коллектора.
Коллектор состоит из медных изолированных пластин (ламелей) закрепленных по окружности, изолированных друг от друга и корпуса якоря. По ним перемещаются притертые подпружиненные щетки, закрепленные в щеткодержателе, для последовательной подачи тока в обмотки якоря. При подаче напряжения на щетки, якорь начинает вращаться и двигатель постоянного тока выходит в заданный режим.
Универсальный коллекторный мотор
Дальнейшее развитие коллекторных ДПТ позволило использовать их при работе от источников переменного тока. Для этого шихтуется не только якорь, но и цилиндр статора набирается из пластин электротехнической стали, а обмотки возбуждения соединяются последовательно с якорными. Одновременная смена полярности на них при прохождении переменного тока не меняет направление вращения вала двигателей.
Основное отличие — шихтованные статор и якорь делают магнитный поток стабильным и не создают вихревых токов (меньше греются). В остальном универсальный двигатель мало чем отличается от обычного коллекторного.
Вентильно-индукторные двигатели
Такие электромоторы иногда называются бесщёточными или безколлекторными. Суть такой конструкции в том, что ротор имеет зубчатое строение, собранное из постоянных магнитов, а обмотки возбуждения размещаются на зубчатых полюсах статора.
Переключением полюсов (катушек) занимается встроенный контроллер, за обратную связь, контролирующую положение якоря (ротора), отвечает датчик Холла. При включении пары катушек магнит на роторе движется к ней, затем следующая пара получает питание. Скорость вращения определяется частотой переключения катушек — чем выше частота, тем выше скорость.
Недостатком такой конструкции является пульсирующий крутящий момент. Плюсы: нет коллектора и щеток, простая конструкция, хорошее управление скоростью и малые габариты.
Безколлекторный с независимым возбуждением
Конструкция ротора этого двигателя собрана из двух зубчатых пакетов из магнитной стали на общей оси. Вершины зубцов пакета смещены друг относительно друга на 120°. Пакеты отстоят друг от друга на расстоянии, а зубцы одного совпадают с впадинами другого, таким образом, что суммарный магнитный поток ротора равен нулю.
Размещенная на статоре обмотка возбуждения тоже распределена со смещением в 120°. Собранный из электротехнической стали статор имеет размер такой, чтобы его магнитное поле перекрывало оба пакета магнитов ротора.





Поочередное включение катушек ротора создает магнитное поле в обоих магнитных блоках и ротор начинает плавно вращаться. Изменяя частоту и направление переключения секций обмотки возбуждения, а также силу тока в них, можно получить бесконтактный реверс, линейный крутящий момент и плавное изменение скорости.
Кроме этих достоинств есть еще отсутствие магнитов и графитовых щеток с коллектором. К недостаткам можно отнести сложность конструкции двигателей и питание обмоток от электронного преобразователя.
Несомненными достоинствами двигателей постоянного тока можно отнести:
- уровень плавного регулирования скорости достигает 10000 об/мин;
- легкость управления скоростью за счет напряжения, а крутящего момента — током якоря;
- за счет обратной связи можно поддерживать хороший момент на малых оборотах.
Их недостатков можно отметить обязательное наличие преобразователя переменного тока в постоянный и сложность конструкции некоторых видов двигателей (коллектор со щетками, сложный якорь).
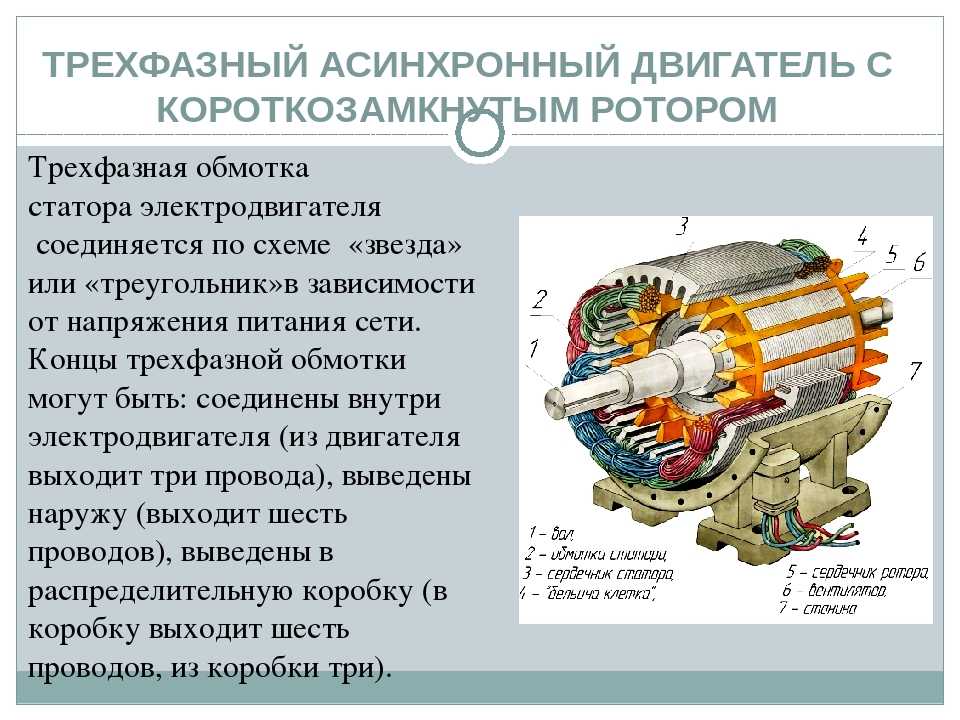
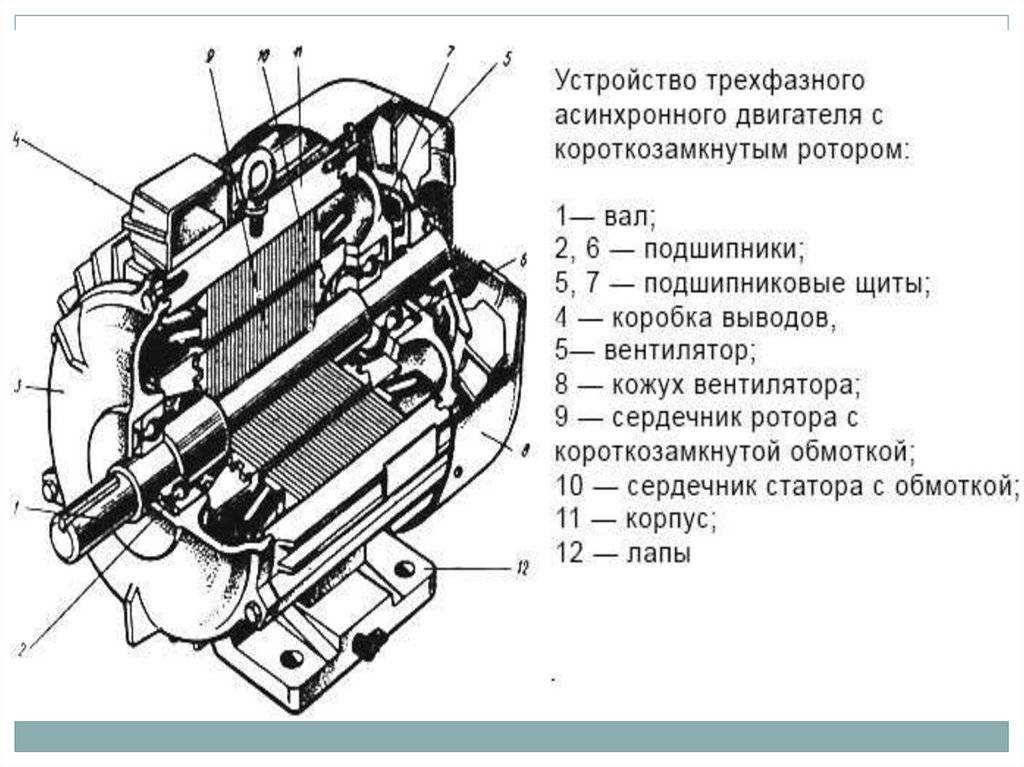
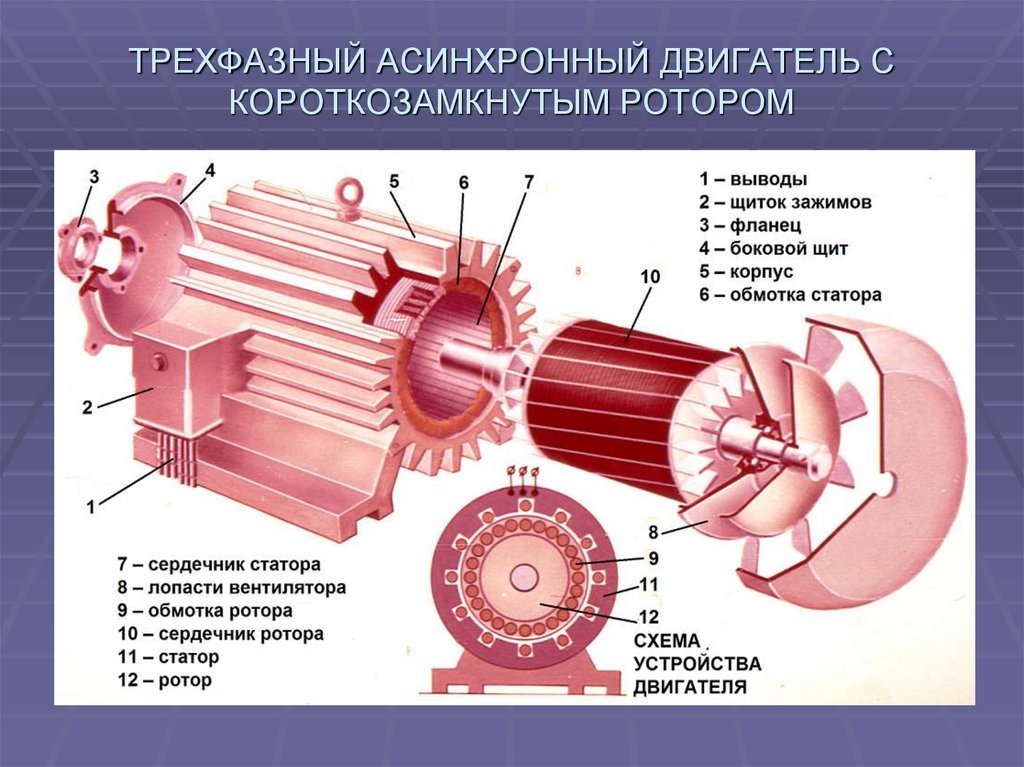
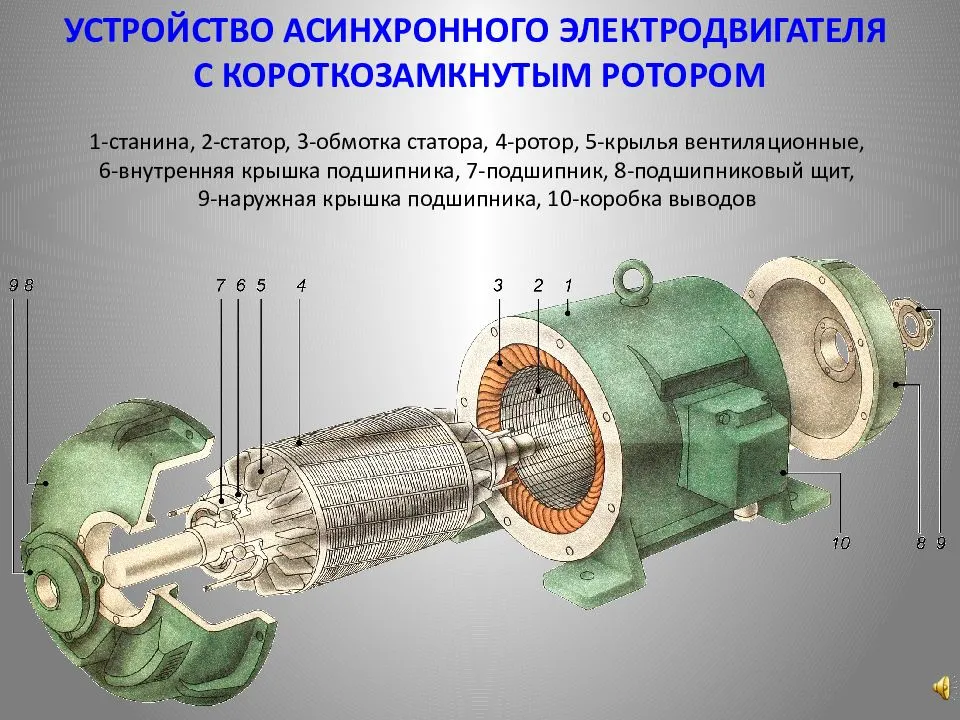
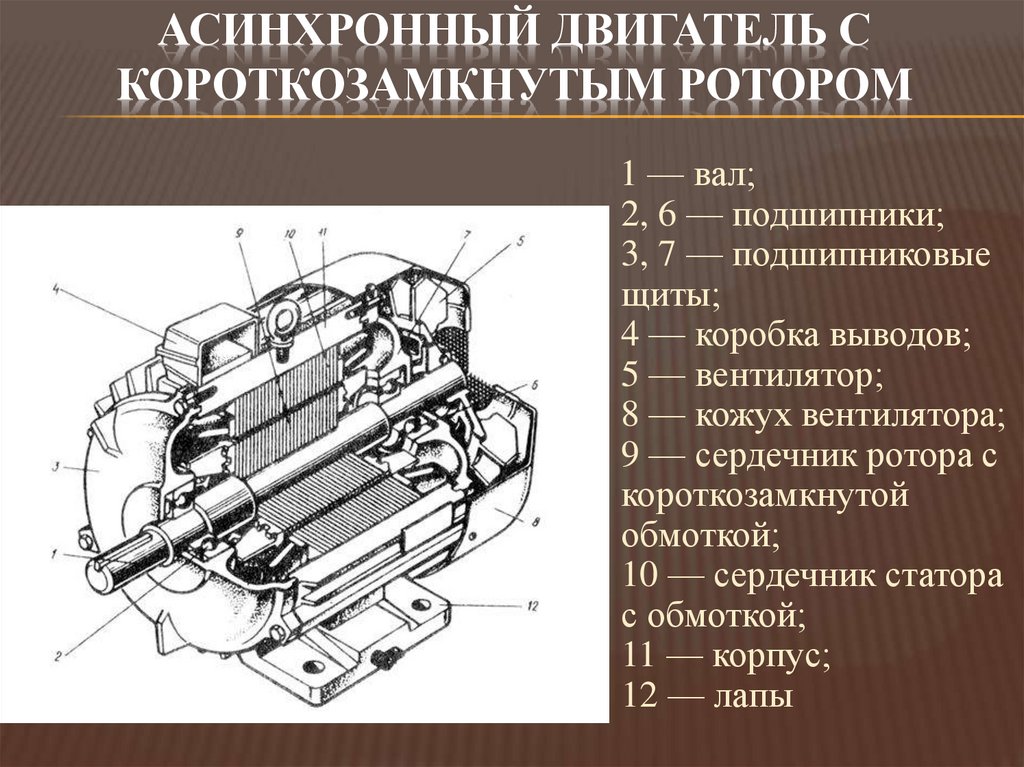
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.
- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов – обеспечивающие вращение, охлаждение и защиту механизма.
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
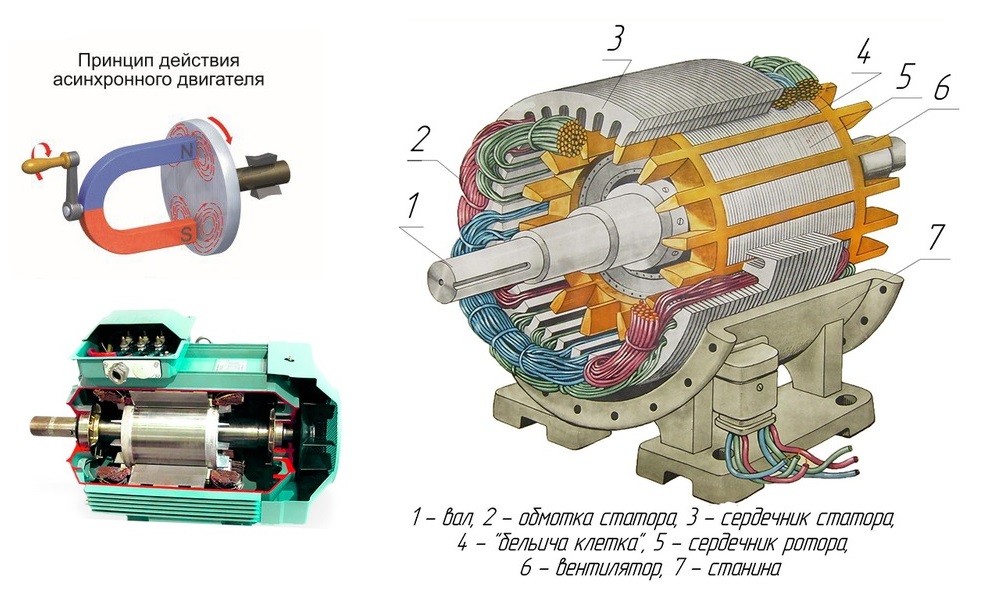
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- Крутящийся ротор пытается «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.
Защита электродвигателей
 Автоматы защиты электродвигателя трёхфазного предохраняют от тока короткого замыкания, от длительных перегрузок, от дисбаланса фаз в электропитании или внутри электродвигателя. Это приводит к перегреву двигателя и к отказам в работе. Защитное устройство автоматически отключит двигатель при появлении нештатной ситуации.
Автоматы защиты электродвигателя трёхфазного предохраняют от тока короткого замыкания, от длительных перегрузок, от дисбаланса фаз в электропитании или внутри электродвигателя. Это приводит к перегреву двигателя и к отказам в работе. Защитное устройство автоматически отключит двигатель при появлении нештатной ситуации.
Часто применяется защита электродвигателя при помощи универсальных мотор-автоматов. Эти устройства имеют модульную конструкцию и управляют работой силовых контакторов, а некоторые мотор-автоматы разрешают точно регулировать параметры защитного отключения.
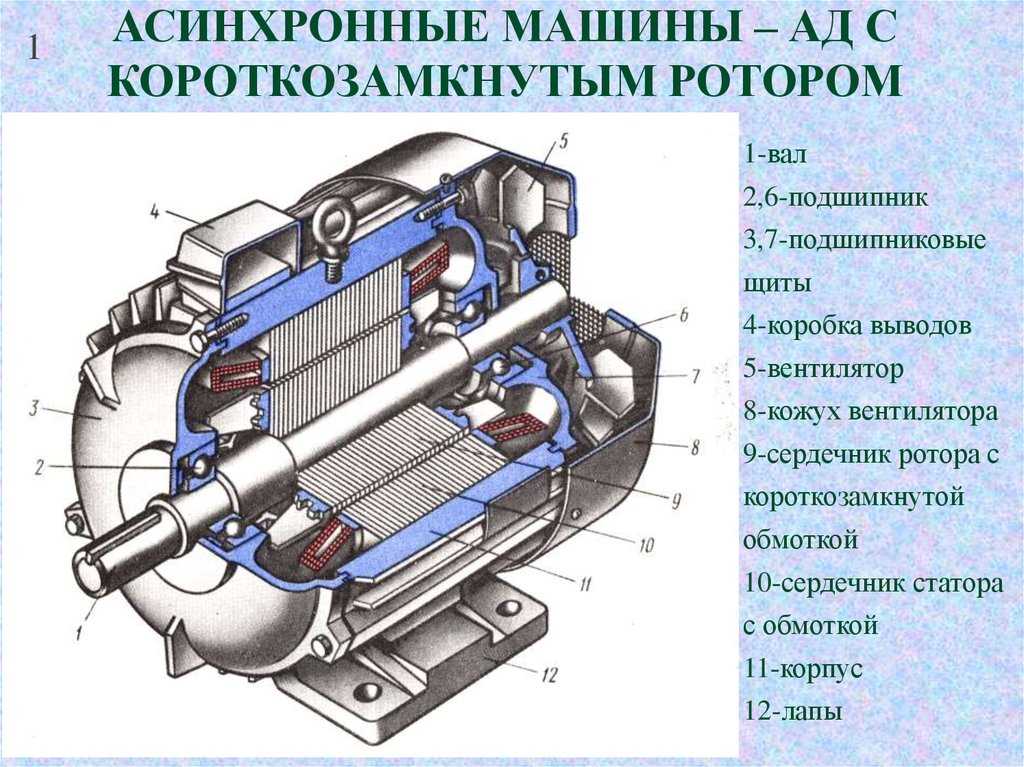
Вал ротора, подшипниковые щиты, подшипники, вентилятор, фланцы, детали крепежа
Вал ротора является ответственной деталью. От жесткости вала и точности его обработки зависит равномерность воздушного зазора между статором и ротором. Валы диаметром до 100 мм обычно изготавливают из стального проката.
Подшипниковые щиты служат для конструктивного соединения вала ротора со станиной; их отливают из чугуна или алюминия, иногда делают сварными из стали.
В электрических машинах применяют подшипники качения шариковые и роликовые, а также подшипники скольжения. Встроенный вентилятор, сидящий на валу ротора, должен создавать определенное давление для прогонки достаточного количества воздуха через машину. В электрических машинах используют вентиляторы трех типов: центробежные, осевые, смешанные. У машин закрытого типа вентилятор ставится на выступающий конец вала.
Для защиты обмоток от попадания влаги и для направления движения воздуха в двигателях применяют металлические диффузоры. Фланцы и детали крепежа используются обычные, как и в других устройствах.
Величина воздушного зазора между статором и ротором (порядка 0,2—1,2 мм, в зависимости от мощности электродвигателя) оказывает большое влияние на работу. С увеличением зазора энергетические показатели двигателя резко ухудшаются.
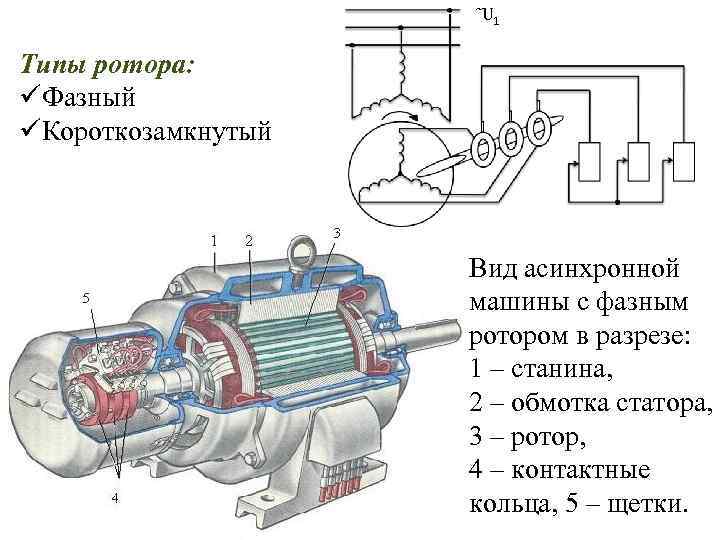
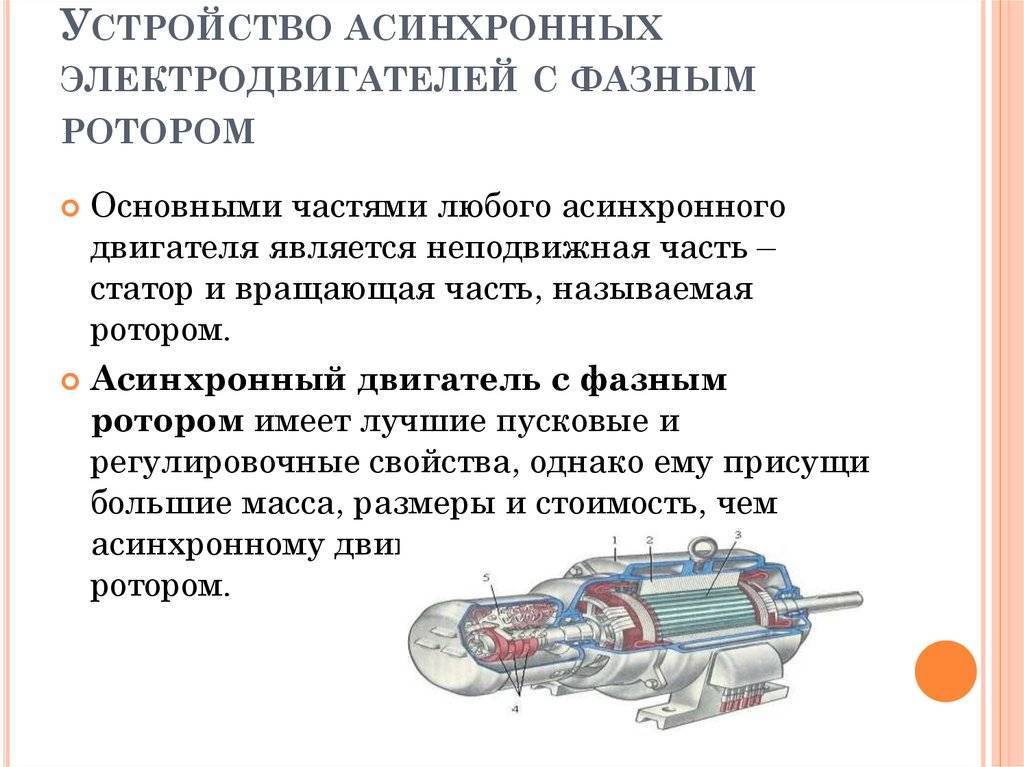
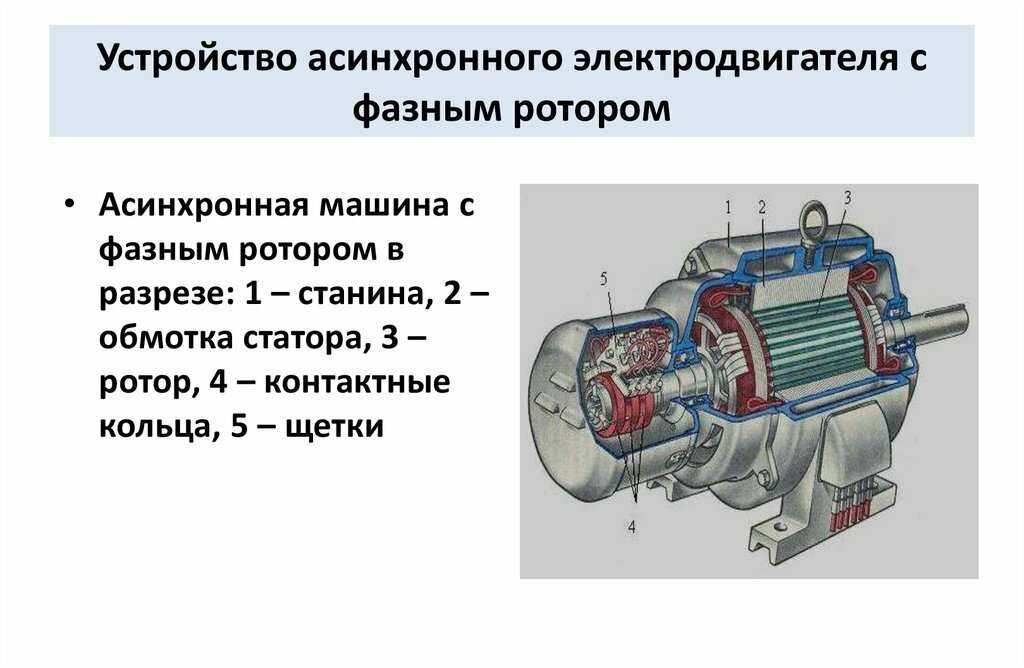
Устройство фазного ротора
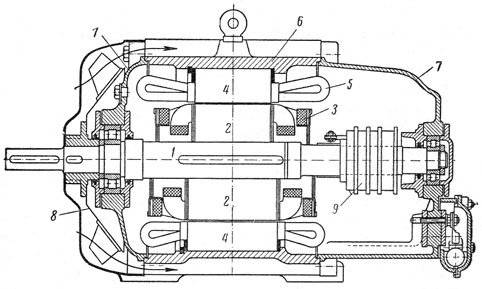 Разрез асинхронного двигателя с фазным ротором. Рисунок 4 1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Разрез асинхронного двигателя с фазным ротором. Рисунок 4 1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор характерен наличием трех фазных обмоток. Они, зачастую, соединяются по схеме звезды (иногда по схеме треугольника). Каждый конец фазной обмотки присоединен к медному кольцу. Кольца же укрепляются на валу и изолируются. Это дало двигателю еще одно название: асинхронный электродвигатель с контактными кольцами. Всего кольца три. Их плотно насаживают на вал с помощью изоляционных прокладок. На кольца наложены щетки (они расположены в щеткодержателе, в свою очередь укрепленных на крышке подшипника).
Щетки всегда имеют исправный электроконтакт с кольцами. Это соединяет их с самой обмотками якоря. Между собой щетки соединяет трехфазный реостат.
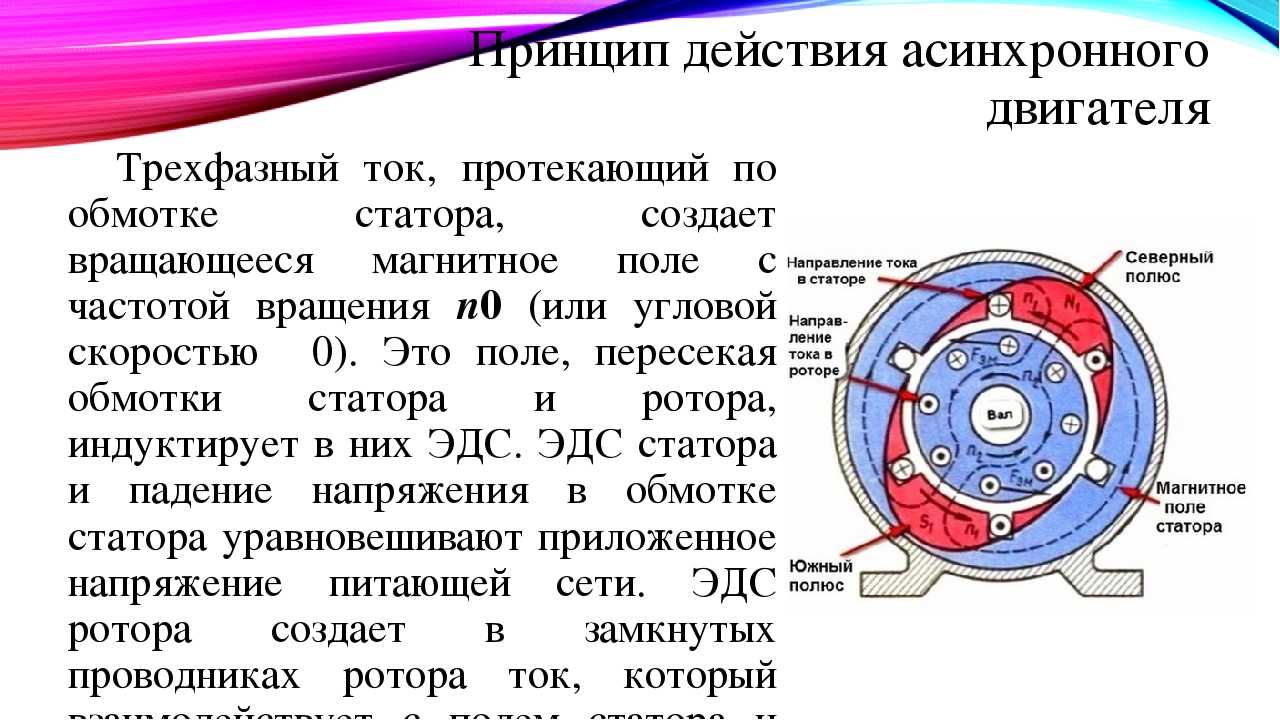
Принцип работы асинхронной машины
Все асинхронные двигатели работают по принципу вращающегося магнитного поля. Но как создать такое поле? Самый простой способ – вращать постоянный магнит по оси. Можно взять медный диск и крутить магнит уже вокруг него. Если магнит достаточно силен, то медный диск тоже начнет вращаться, как бы пытаясь угнаться за магнитом. Будет создаваться ощущение, что между двумя предметами есть некая связь которая постоянно их удерживает. Движение магнита и диска будет не синхронным, ведь последний всегда будет отставать в «погоне».
Объяснение этому явлению можно дать такое: вращаясь вокруг диска, магнит способен возбудить в нем токи Фуко (индукционные). Их траектория – замкнутый круг. Индукционные токи не имеют начала и конца. Их можно назвать токами короткого замыкания, разогревающими металл. Как правило, от них нужно избавляться, но в этом случае именно они и являются причиной появления магнитного поля в диске. Далее это поле начинает взаимодействие уже с полем самого постоянного магнита.
Асинхронные электромоторы работают по такому же принципу, но вращающееся поле создает не магнит, а обмотка статора. В ней, собственно, и создается подходящее для вращения поле.
Подобные условия возможно создать только в системе с несколькими фазами, где ток сдвигается на несколько градусов. В бытовых электроприборах двигатели обычно с двумя фазами, причем вторую создают искусственно. Для этого используют сдвигающий конденсатор, катушку или сопротивление. Электродвигатели, используемые на промышленных предприятиях, выпускают с тремя фазами.
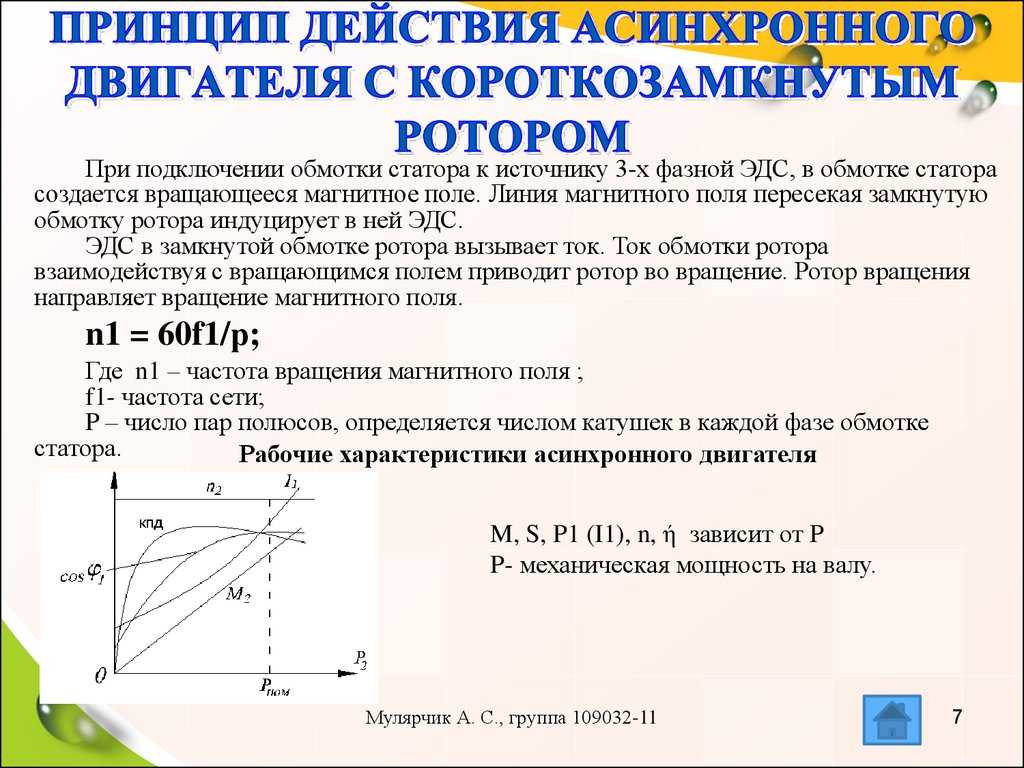
В самом первом трехфазном асинхронном электродвигателе было три обмотки. Они были удалены друг от друга на 120 градусов. Схема работы такого двигателя и синусоидальный ток трех его полюсов показан на рисунке 4.
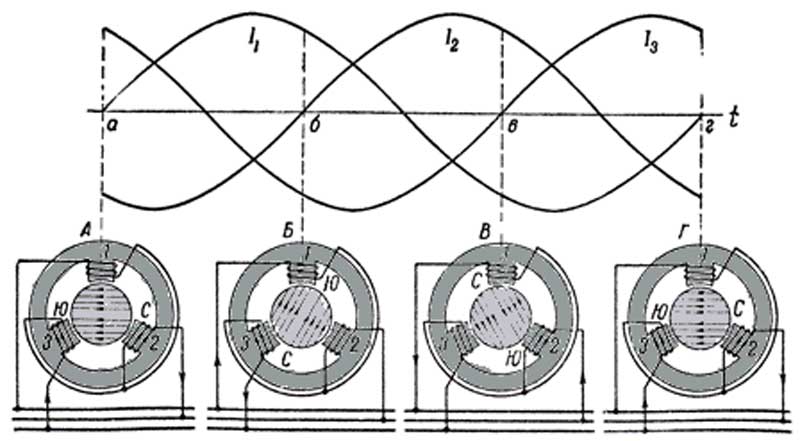 Рисунок 4
Рисунок 4
Итак, в тот момент, когда в одной из фаз ток нулевой, в остальных он принимает максимальные значения, при этом фазы отличаются по направлению тока. Таким образом и создается магнитное поле между двумя из трех обмоток. Далее все тут же меняется: один полюс отключается, а другой, тот что остался работать, начинает менять полярность. Это происходит из-за изменения направления тока в обмотке. А тот полюс, что только перешел в рабочее состояние, поддержит смещение поля. Благодаря этому в якоре машины формируются вихревые токи (так как линии магнитного поля пересекают часть ротора). Токи входят во взаимодействие с полем статора, которое уже вращается, пытаются его как бы догнать. Происходит поворот ротора.
Такой принцип работы асинхронной машины, который был выведен еще в XIX веке, актуален и для тех электромоторов, что производят сегодня. Однако, изменения в конструкции все же произошли. Дисковые и цилиндровые якори теперь заменили на «беличьи клетки», чаще используют роторы фазного типа. Форма обмотки статичной части двигателя тоже подверглась изменениям. Вместо катушки с полюсным наконечником используют радиальные обмотки: их укладывают в пазы.
Стоит также упомянуть о том, что такое схема замещения асинхронного двигателя. Ее часто используют в электротехнике во время проведения расчетов. Вместо самого электродвигателя подставляют эквивалентную схему, где электромагнитную связь замещает электрическая.
Как подключить электродвигатель к сети
Питающее напряжение у разных потребителей разное, из-за этого время от времени электрическое оборудование приходится переподключать. Предложенная ниже инструкция поможет безопасно подключить электродвигатель на 220 В.
Задача достаточно проста. Главное в этом деле – не ошибиться при подключении обмоток. Классификация двигателей включает в себя два типа:
- трехфазного с обмоткой (схема включения звезда или треугольник);
- однофазного (у него пусковая обмотка).
Их способы подключения мы и рассмотрим.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в “звезду”, а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.

Пуск АДФР
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов .
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
ГОСТ 26772-85 Машины электрические вращающиеся. Обозначение выводов и направление вращения.
А.И.Вольдек. Электрические машины. Учебник для студентов высш. техн. заведений. изд. 2-е, перераб. и доп.-Ленинград: Энергия, 1974.
Скольжение и скорость вращения
Частота вращения магнитного поля статора (n1) больше, чем частота вращения ротора (n2). Разница между ними называется скольжением, а обозначается латинской буквой S и вычисляется по формуле:
S=(n1-n2)*100%/n1
Скольжение не является недостатком этого электродвигателя, поскольку если бы его вал вращался с той же частотой, что и магнитное поля статора (синхронно), то в его стержнях не индуцировался бы ток, и он бы просто не стал вращаться.
Теперь о более важном понятии — частота вращения ротора асинхронного электродвигателя. Она зависит от 3 величин:
- частота напряжения питающей сети (f);
- число пар магнитных полюсов (p);
- скольжение (S).
Число пар магнитных полюсов определяет синхронную скорость вращения поля и зависит от числа обмоток статора. Скольжение зависит от нагрузки и конструкции конкретного электродвигателя и лежит в пределах 3-10%, то есть асинхронная скорость совсем немного меньше синхронной. Ну а частота переменного тока у нас фиксирована и равняется 50 Гц.
Поэтому частоту вращения вала асинхронного двигателя сложно регулировать, вы можете воздействовать лишь на частоту питающей сети, то есть установив частотный преобразователь. Можно и понижать напряжение статора, но тогда уменьшается мощность на валу, тем не менее такой приём применяют при пуске АД с переключением обмоток со звезды на треугольник для уменьшения пусковых токов.
Частота вращения поля статора (синхронная скорость) определяется по формуле:
n=60*f/p
Так в двигателе с одной парой магнитных полюсов (два полюса) синхронная скорость равна:
60*50/1=3000 об/мин
Наиболее распространены следующие варианты электродвигателей с:
- одной парой полюсов (3000 об/мин);
- двумя (1500 об/мин);
- тремя (1000 об/мин);
- четырьмя (750 об/мин).
Реальная скорость вращения ротора будет несколько ниже, на реальном асинхронном двигателе она указывается на шильдике, например, здесь – 2730 об/мин. Несмотря на это, в народе такой асинхронный двигатель будут называть согласно синхронной скорости или просто «трёхтысячник».

Тогда его скольжение равняется:
3000-2730*100%/3000=9%